Introduction
I am a 2nd year PhD researcher in Aerospace Engineering at Georgia Tech, advised by Bolei Deng and Christos Athanasiou. I hold an M.Des. (Mediums/Technology track) from the Harvard Graduate School of Design with cross-registration at MIT Media Lab and CSAIL, with prior research experience at Harvard’s Microrobotics Lab (Robert Wood group), the HCIE group at MIT CSAIL (Stefanie Mueller group), and the Morphing Matter Lab at CMU (Lining Yao group).
News
- 2026.05 Our workshop “Mechanically Intelligent Soft Robotics” has been accepted by IROS committee! See you in Pittsburgh this Oct.!
- 2026.05 Our paper on remote disassembly of electronics-free modular structures is published in Nature Communications.
- 2026.01 Our paper on sub-hertz band gaps in inerter-based metamaterials is published in Physical Review Applied.
- 2025.12 Our paper on electronic-free particle robots is selected as the journal front cover in Advanced Intelligent Systems.
- 2025.11 Attended ASME IMECE and presented “Integrated High-Throughput In-Situ Mechanical Characterization of Additively Manufactured Structures”.
- 2025.10 Attended the Society of Engineering Science Technical Meeting and presented “Remote Disassembly of Electronics-Free Modular Structures”.
- 2025.09 Our paper on Passive Vacuum Regeneration for Suction-Based Marine Adhesion Devices is published in IEEE Journal of Oceanic Engineering.
- 2025.09 Attended ASME SMASIS and presented “Bioinspired, Wind-Triggered, Biodegradable Seed Carrier for Electronic-Free Precision Deployment”.
- 2025.07 Our paper on electronic-free particle robots is published in Advanced Intelligent Systems.
- 2024.08 Attended IDETC/CIE and presented “Electronic-Free Particle Robots Communicate through Architected Tentacles”.
- 2024.06 Started my PhD journey at Georgia Tech Aerospace Department.
Research Highlights
My research focuses on the design and fabrication of mechanically intelligent systems, asking how robotic functionality can be physically encoded into structure, material architecture, and dynamics. Rather than treating robots as bodies controlled only by electronics, I study how the body itself can filter information, route mechanical signals, switch states, respond to stimuli, and generate behavior.
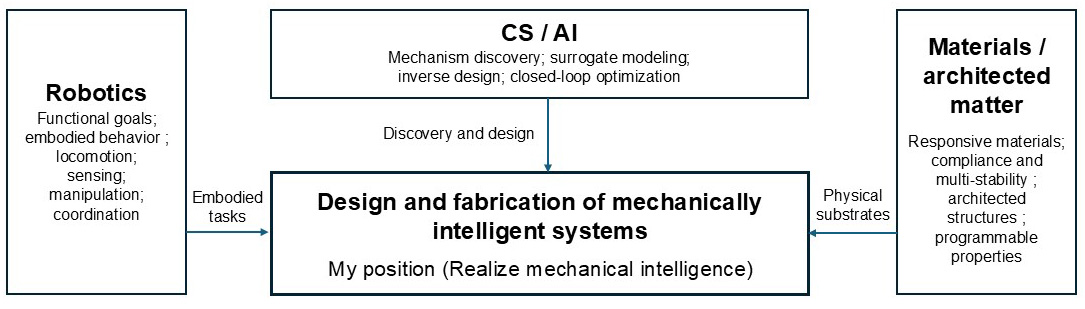
Toward robotics. I develop mechanically intelligent systems in which sensing, locomotion, manipulation, and coordination emerge from structure, dynamics, and material response, reducing reliance on electronic hardware, centralized control, or onboard power.
Toward materials. I use materials and architected matter as programmable physical substrates, where responsiveness, compliance, multistability, and designed frequency response can be encoded directly into structure.
Toward AI. I use AI to support mechanism discovery, surrogate modeling, inverse design, and closed-loop optimization, helping identify structure-function relationships and translate mechanical principles into realizable robotic systems.
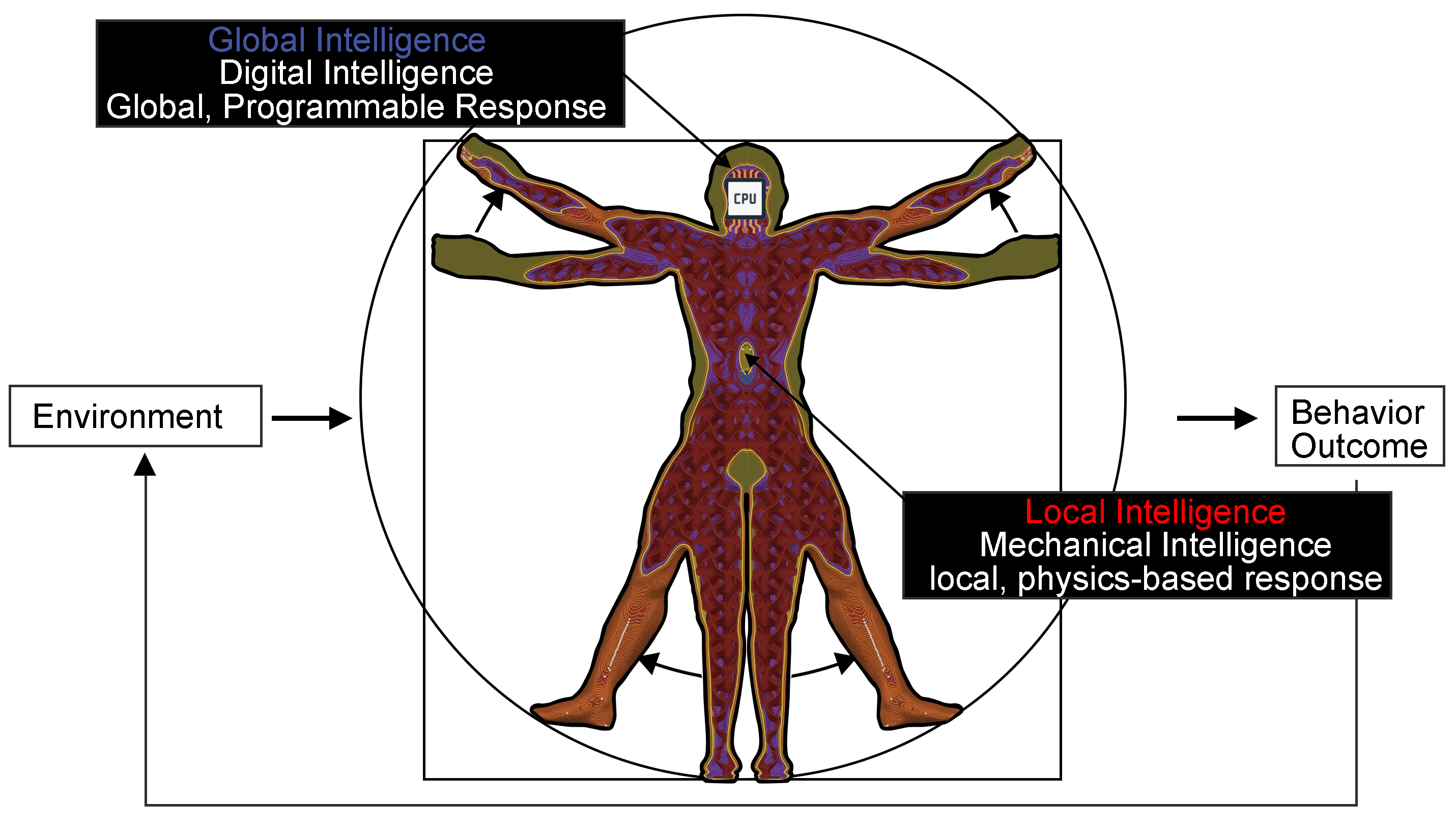
At the core of this research is a mechanics-first framework for robotic intelligence. In a recent perspective, we identify three fundamental operations through which mechanical intelligence can be realized in the physical body: filtering (selective reshaping of inputs by frequency, direction, or magnitude), routing (geometry-defined propagation of mechanical signals), and switching (discrete state transitions through instability and multistability). These operations provide a basis for sensing, locomotion, manipulation, and coordination without relying exclusively on electronic control.
I approach this framework through two connected layers. The first concerns how mechanical operations produce robotic behavior. The second concerns how design, fabrication, and material architecture make such systems physically realizable.
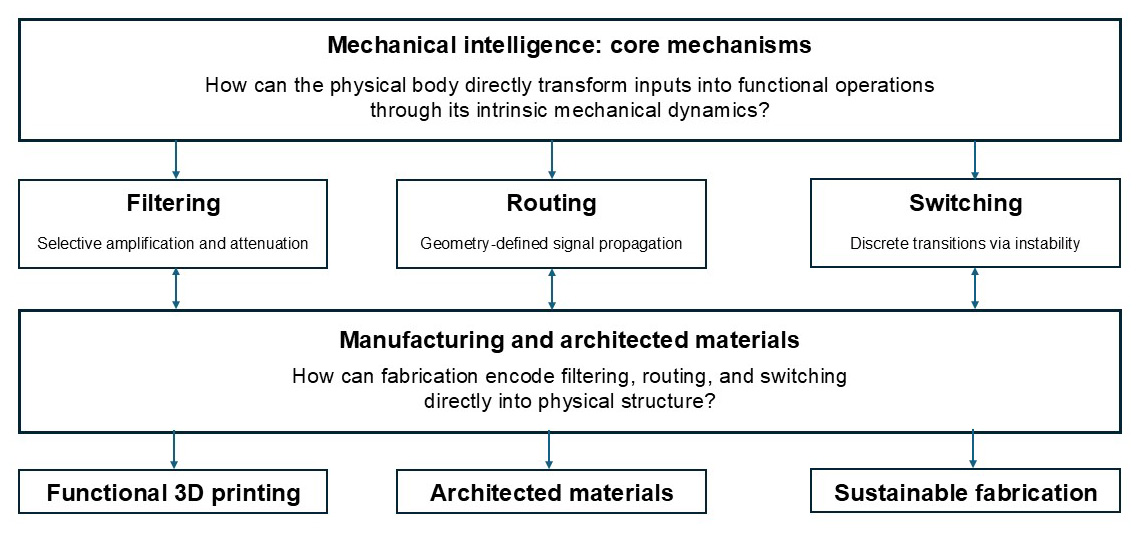
1. Mechanisms and behaviors
I study how filtering, routing, and switching, realized through geometry, compliance, resonance, and energy landscapes, give rise to frequency-selective locomotion, resonance-driven crawling, wind-triggered deployment, remote disassembly, and collective behavior in particle robot swarms. These systems operate without conventional electronics, centralized control, or onboard power.
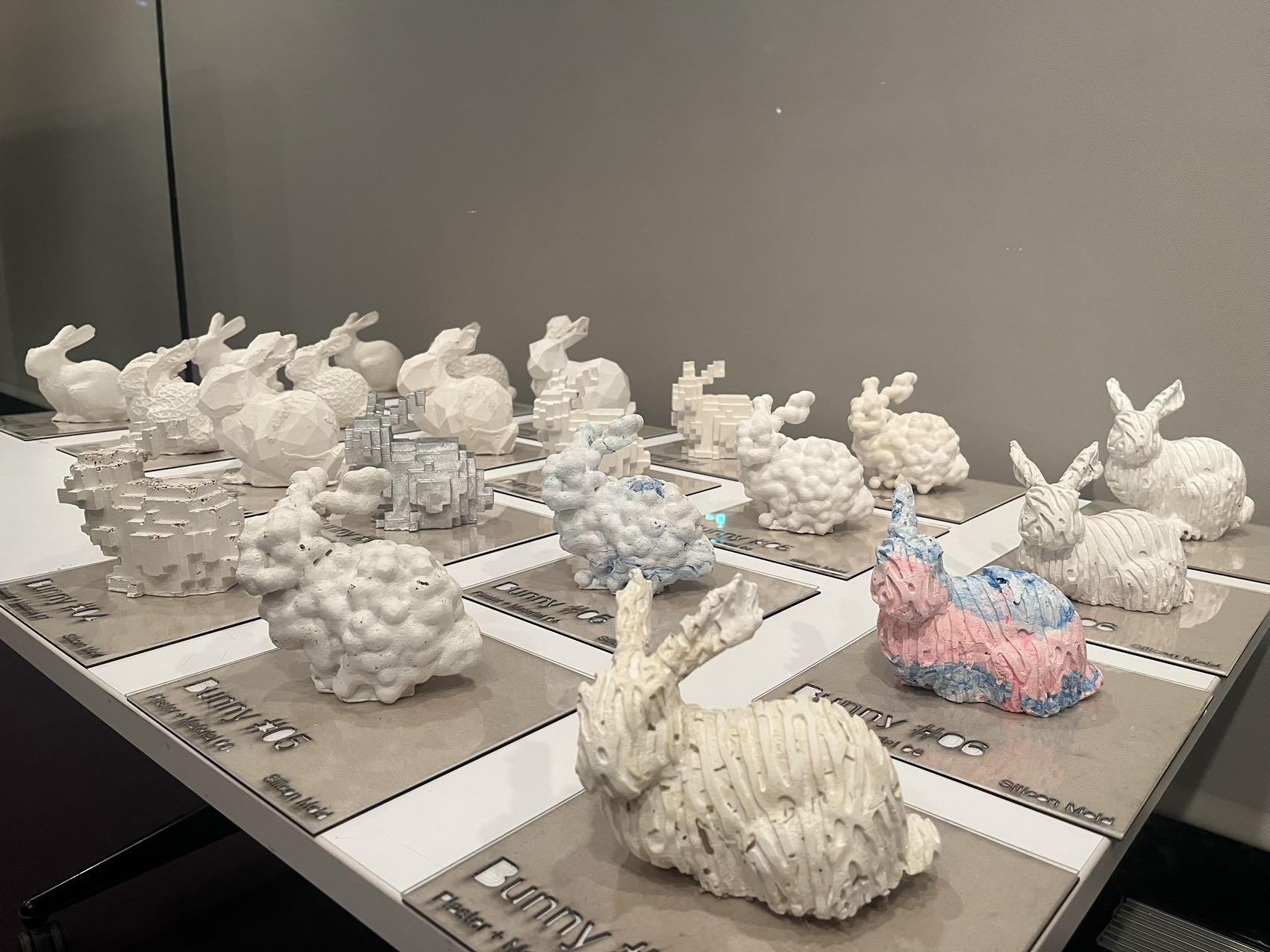
2. Design, fabrication, and architected materials
I investigate how fabrication can encode mechanical intelligence directly into physical structure: functional 3D printing with in-situ characterization, architected materials with designed dynamic response, and sustainable fabrication using biodegradable and recyclable materials. In this view, fabrication is not a downstream implementation step; it is where filtering, routing, switching, and responsiveness become physically programmed.
Selected Publications


Selected Projects

# indicates co–first authors. * indicates corresponding authors.
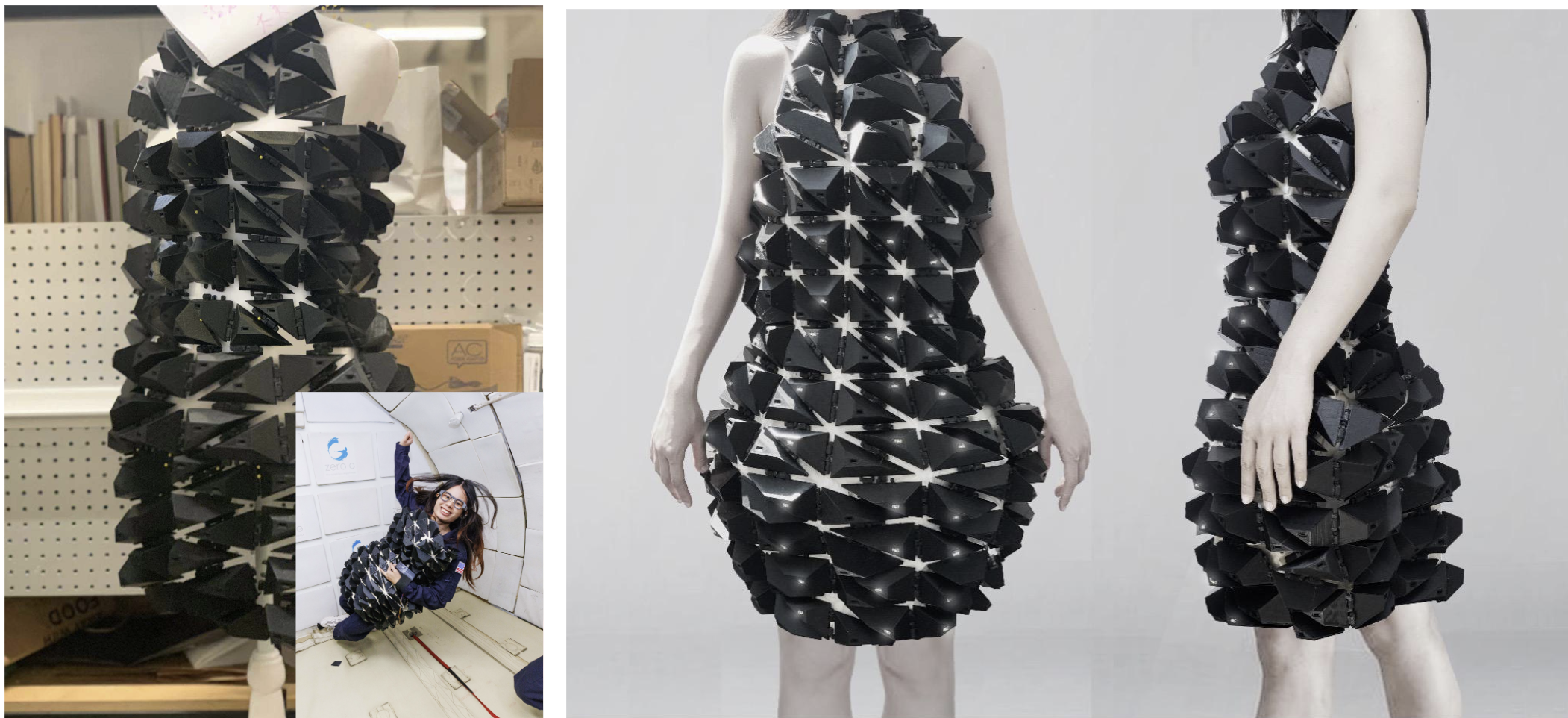
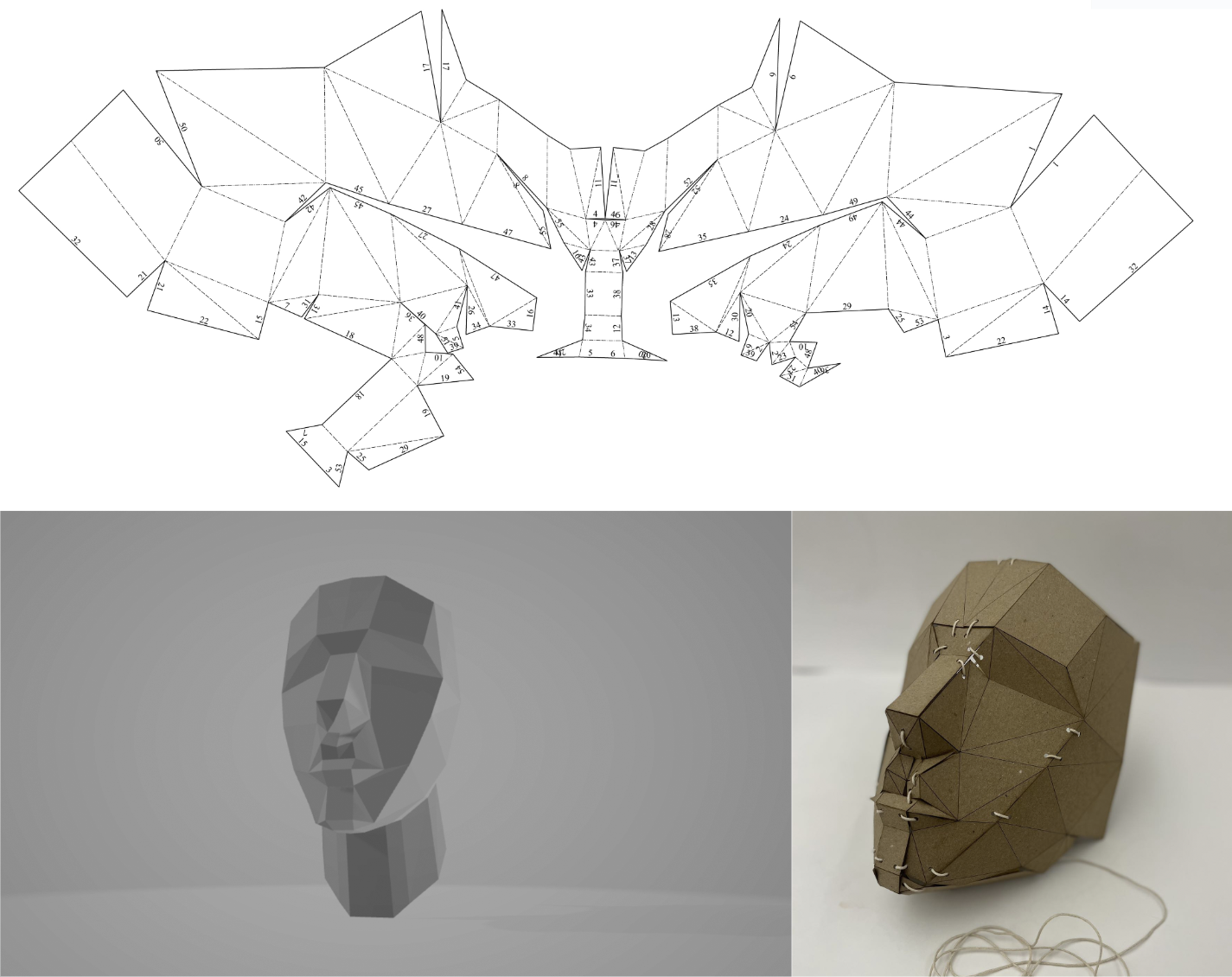
Art Practice
Alongside my research, I maintain an independent art practice that treats mechanical structure as a medium for thought. The works are not illustrations of research — they are governed by a different standard: structural equivalence between a physical phenomenon and its conceptual meaning, not metaphorical analogy. Each piece begins with an engineering fact and asks what that fact already says, without narrative imposed from outside. Full portfolio at xinyiyang.space.
Earlier Foundations
Before my PhD, my work explored how material behavior, fabrication, and interaction design can turn physical structures into responsive systems.