
Sitemap
A list of all the posts and pages found on the site. For you robots out there, there is an XML version available for digesting as well.
Pages
Posts
Future Blog Post
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Blog Post number 4
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 3
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 2
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 1
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
portfolio
Clustering Dynamics of a Pendulum–Quadcopter
How can we uncover patterns in complex flight dynamics without supervision? This project applies a two-level K-Means clustering approach to a pendulum–quadcopter simulation. At the state level, individual time-step observations were clustered into five characteristic modes, such as hovering, aggressive pitching, and payload swinging. At the trajectory level, statistical features of each flight were clustered into four groups, revealing distinct regimes ranging from stable behavior to highly energetic maneuvers. Visualization through scatter plots, boxplots, and animated simulations highlighted how state transitions accumulate into different trajectory profiles. With evaluation metrics including silhouette and Davies–Bouldin scores confirming clustering quality, the study shows how unsupervised learning can structure chaotic motion data into interpretable behavioral categories 
Rapid Folding via Pull Up Nets
Can you imagine everything in the world folded into 3D from a flat 2D sheet? Pull Up Nets is a fabrication method that transforms flat 2D nets into complex 3D shapes with a single pull. This approach reimagines how everyday objects and structures can emerge from sheets, opening possibilities for design, rapid prototyping, and deployable systems. 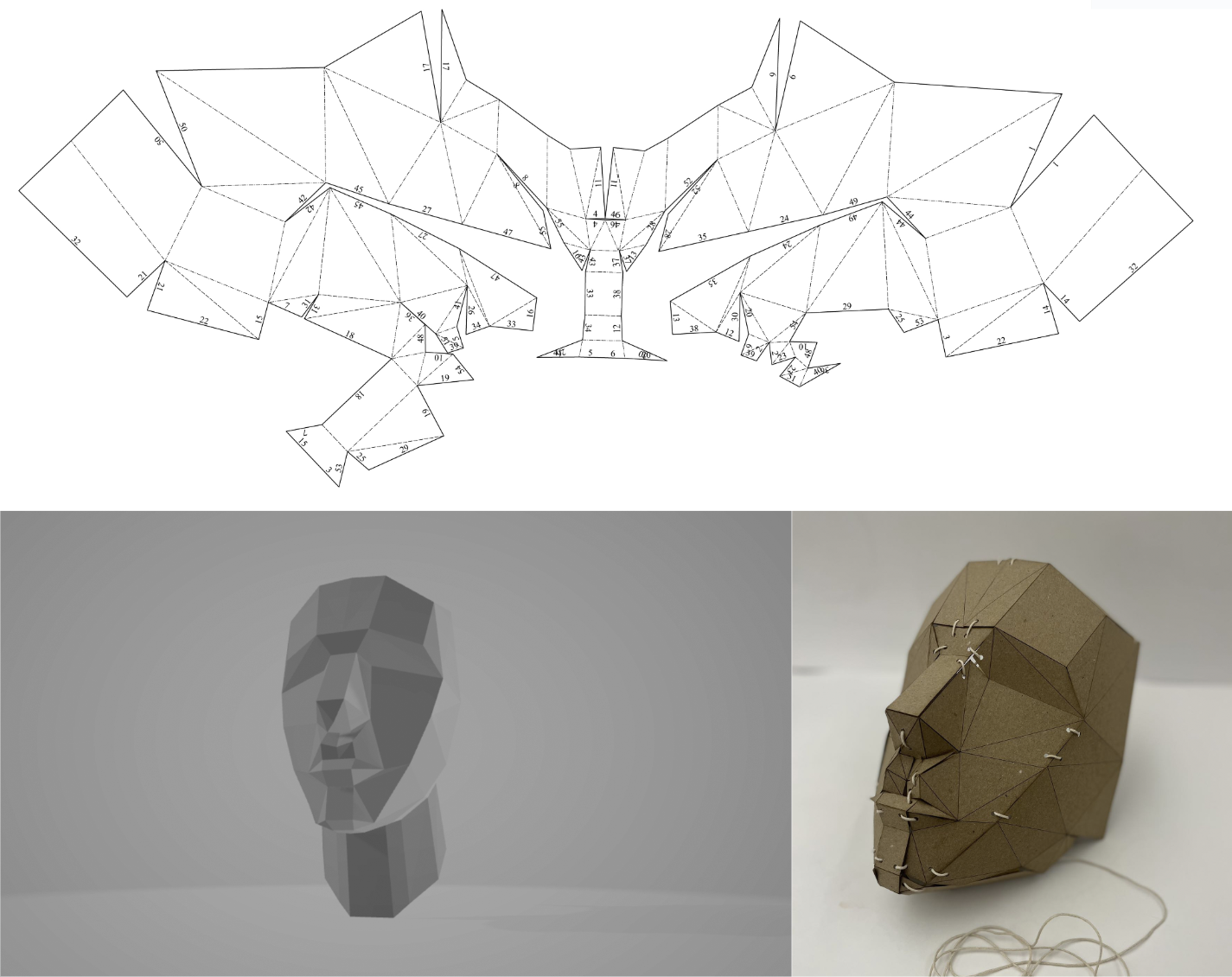
Underwater Robotic Tag: Vacuum Re-generator
How can we make suction tags stick better to whales without electronics? This project develops a passive vacuum re-generator system that uses diving pressure and mechanical syringes to increase suction force. By exploring different syringe volumes, valve settings, and suction cup geometries, we aim to design reliable, electronic-free underwater tags for marine animal research. 
Ferrofluid Music Visualization
What if music could be seen? This project uses ferrofluids and electromagnets to visualize sound in real time. In collaboration with engineering and music students, we created a live performance where liquid metal dances to composed music. 
Computational Textiles: FlexiMesh
How can we design fabrics whose elasticity changes depending on where and how they are stretched? This project introduces FlexiMesh, a computational pipeline for creating 3D printed textiles with localized anisotropic elasticity. By combining four parametric lattice units with mechanical simulation and SLA printing, FlexiMesh lets designers assign region-specific stretch and stiffness within a single continuous surface. The result is textile-like structures that can be tuned for support, flexibility, and actuation, opening applications in rehabilitation devices, adaptive apparel, soft robotics, and deployable aerospace structures 
Interactive Computing Fabric
What if fabrics could sense gestures as naturally as our skin does? This project explores knitted textiles embedded with conductive fibers that transform fabric into a responsive interface. The system can detect not only single or multiple touches but also precise touch locations and even gestures made without direct contact, such as waving a hand above the surface. By blending softness with sensing, this computing fabric opens opportunities for wearable interfaces, interactive environments, and human-centered design. 
Zero-Gravity Fashion: Interactive Space Garment
As commercial spaceflight grows, how might fashion shape the experience of future life in space? This project explores the intersection of couture and zero-gravity through a fully 3D-printed garment composed of 221 interlocking pieces assembled without adhesives. Embedded with 50 LEDs linked to IMU sensors, the garment responds to body movement, creating a dynamic light display in weightlessness. Beyond aesthetics, the work examines fabric morphology in microgravity and reimagines the role of women in space, connecting the history of female contributions to spacesuit design with the possibility of new, expressive forms of spacewear. Positioned at the boundary of science, art, and society, this project envisions a future where high fashion extends into orbit. https://www.media.mit.edu/projects/fashion-in-space-interactive-clothing-the-future-of-fashion-in-sci-fi-context/overview/ 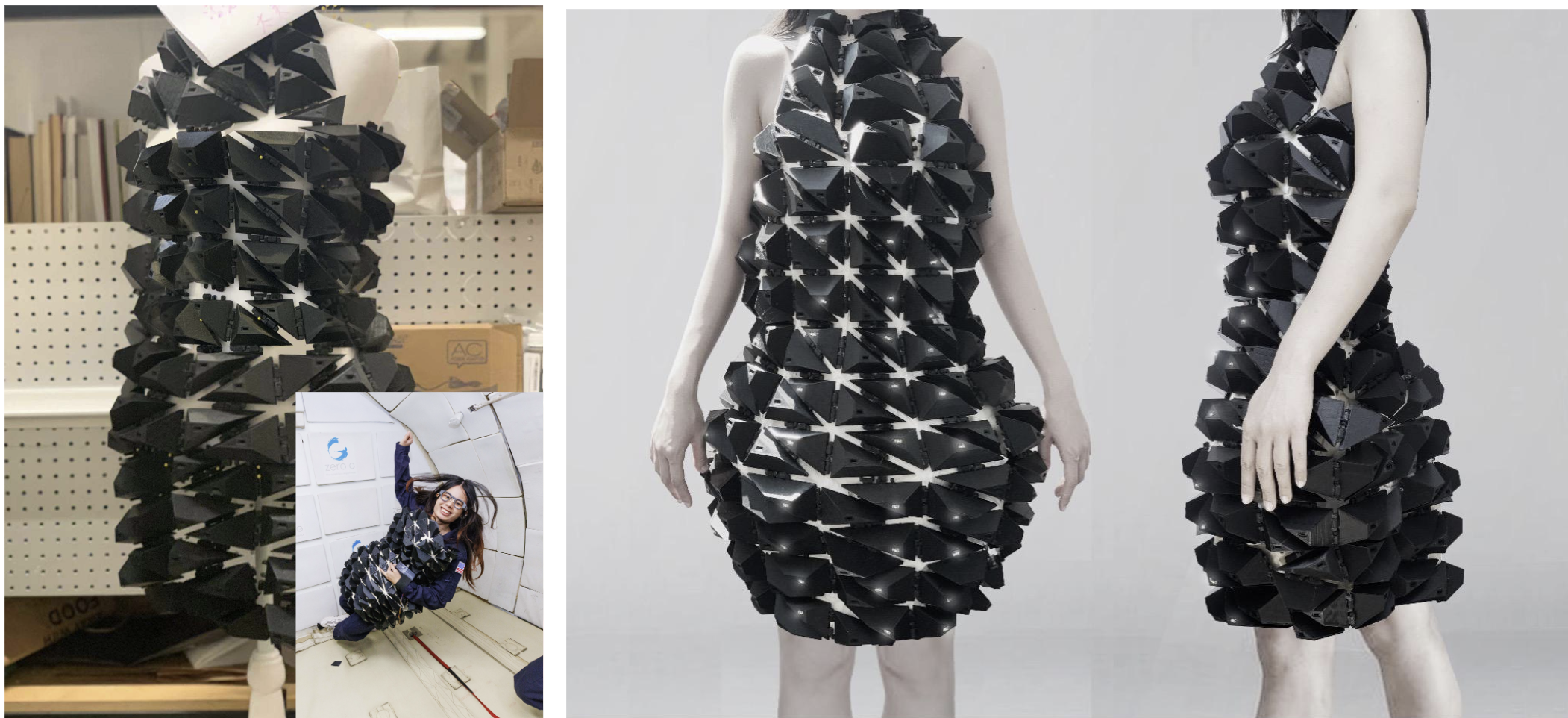
Fabrication Complexity of Stanford Bunny Morphologies
What happens when computer-generated geometries meet the realities of clay fabrication? This project investigates the fabrication complexity of the iconic Stanford Bunny by translating digital morphologies—such as low-poly, one-strip, and bubble variations—into physical ceramic prototypes. Using 3D-printed molds, plaster casting, and silicon molding, the research categorizes which geometries can be achieved, which require alternative methods, and which remain impossible with current techniques. The results reveal unexpected contradictions: high-resolution models are often easier to fabricate than low-poly ones, small undercuts exponentially increase difficulty, and delicate features like ears are prone to failure. By bridging computer graphics with material practice, this work highlights the gap between digital design freedom and physical fabrication constraints 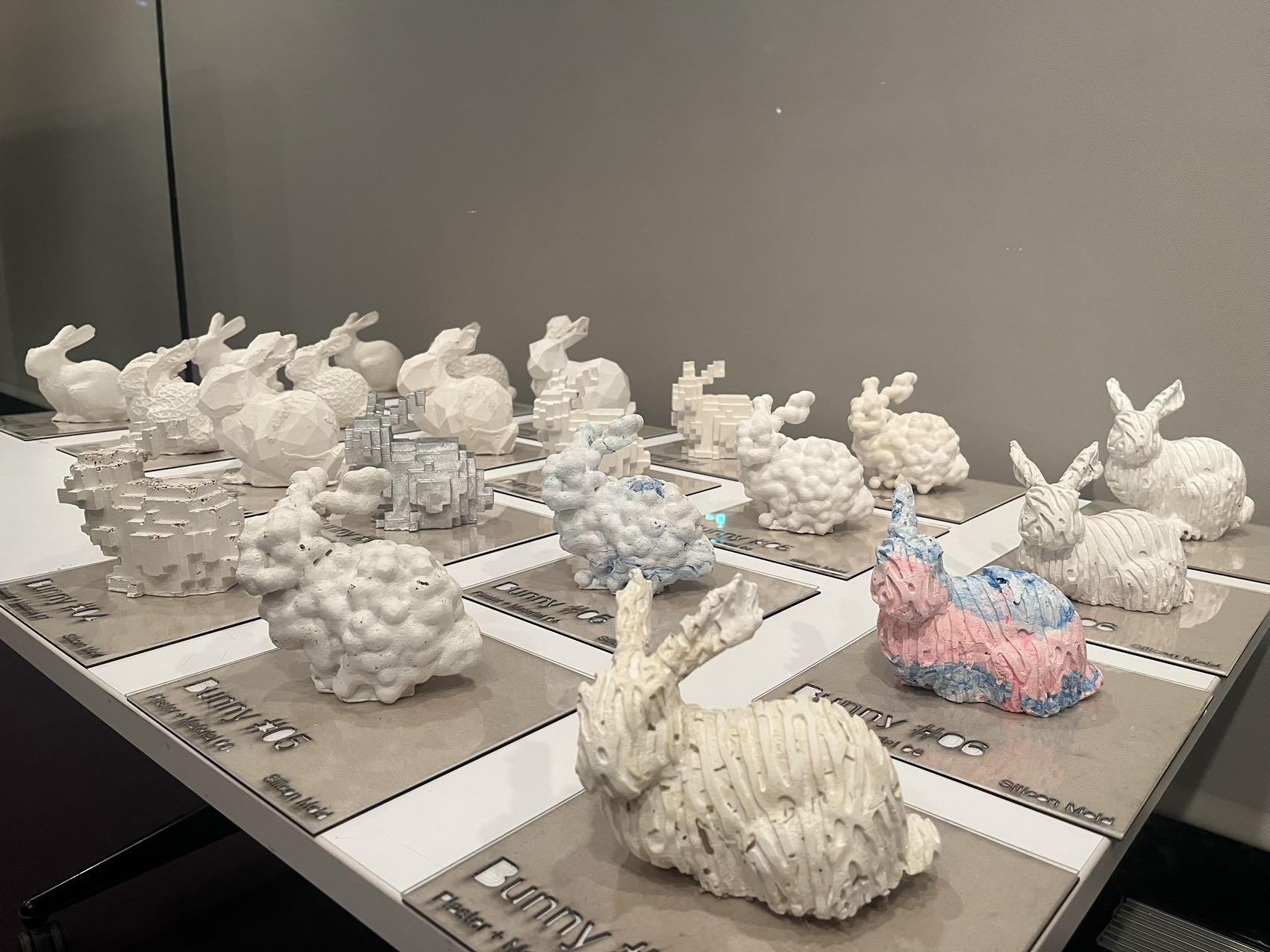
Aerogami: Inflatable Origami Robot
How can origami inspire soft, inflatable robots? This project explores the use of TPU sheets and pneumatic actuation to create lightweight, foldable robots powered by the FlowIO platform. Through iterative design, we tested fabrication methods from heat-press sealing to 3D printing, and investigated how geometric folding patterns influence motion. From simple rolling and grasping behaviors to a three-legged bio-inspired prototype, Aerogami demonstrates how origami principles can translate into adaptive robotic systems. While challenges remain in locomotion control, this work highlights the potential of inflatable origami robots for deployable, low-cost applications in exploration and interaction 
E-Seed Plus: Bio-Inspired Self-Drilling Seeds
How can engineered seeds autonomously plant themselves in soil? Building on the original E-Seed concept, this project advances both performance and manufacturability through material and geometric innovations. The new design introduces modular construction, bilayer tails for enhanced actuation, wax shell tips with plant fibers for orientation, and 3D-printed connectors for scalable assembly. Using chemical washing, molding, and flocking techniques, the team fabricated and tested multiple versions, demonstrating successful soil drilling and germination potential. Beyond improving efficiency, E-Seed Plus also considers pathways for mass manufacturing, highlighting the promise of bio-inspired mechanisms for large-scale reforestation and ecological restoration 
VR Spatial Sensing: Bridging 2D Devices and 3D Environments
How can everyday devices interact seamlessly with virtual reality? This project develops a system that links smartphones to VR headsets using ultra-wideband (UWB) localization and Wi-Fi communication. By measuring azimuth angles between anchors and tags, the system enables phones to act as interactive instruments in VR, triggering sounds and visual responses. Experiments show that wider anchor separation and closer distances improve accuracy, with 50 cm spacing producing the best balance between reliability and practicality. The results highlight how spatial sensing can extend VR experiences beyond headsets and controllers, creating richer multi-device interactions 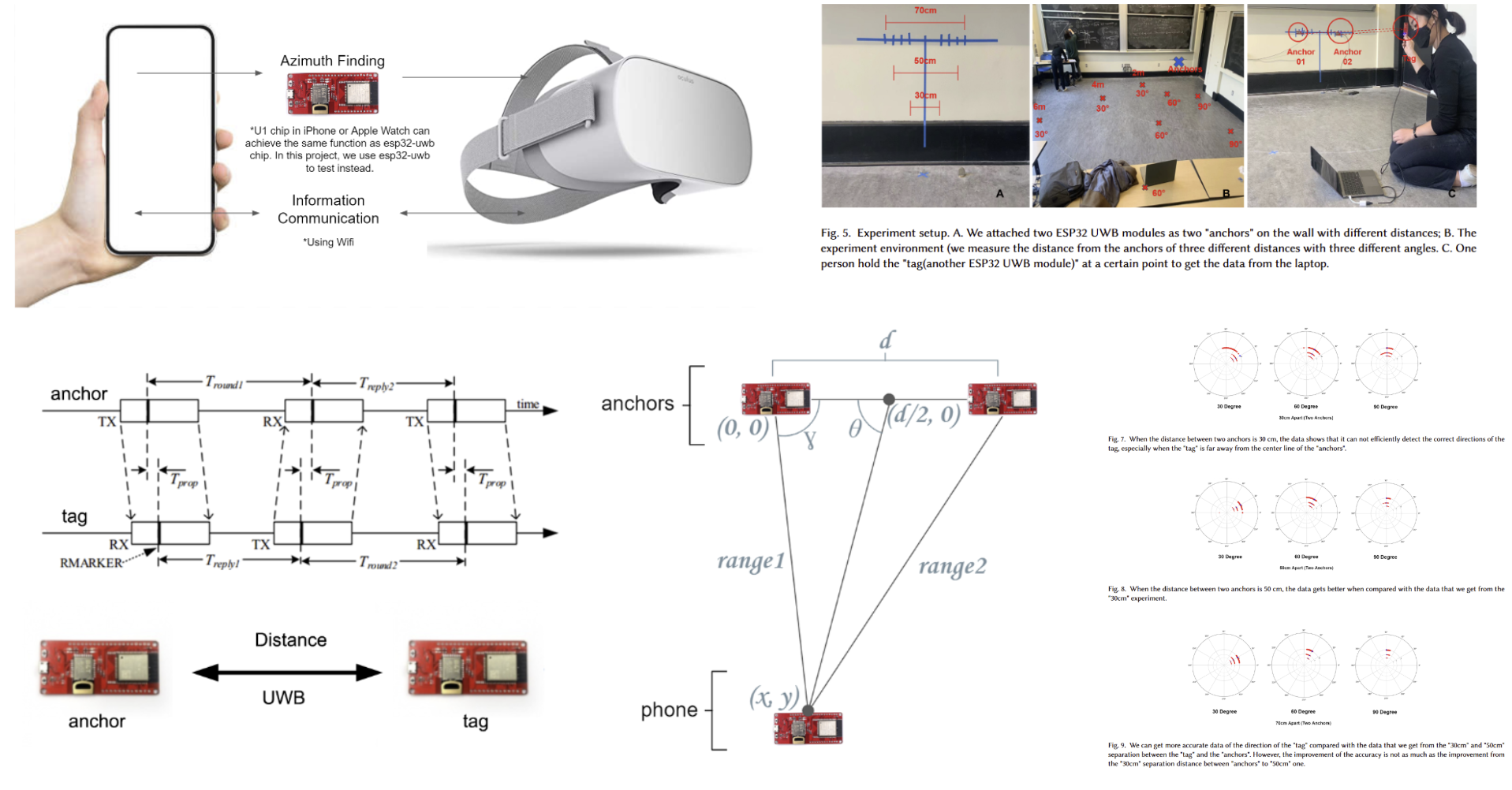
Iterative Yo-Yo Design and Fabrication
This project explores the end-to-end process of toy making through the design and fabrication of a custom yo-yo. Using CNC machining to produce molds, injection molding to form the body, and vacuum forming for plastic components, we refined each iteration through trial and error to control defects and improve part quality. Across multiple design versions, adjustments were made to geometry and assembly until the yo-yo achieved both functional performance and a clean snap-fit finish. The project demonstrates how iterative prototyping and precision manufacturing techniques can converge to create playful yet robust consumer products. 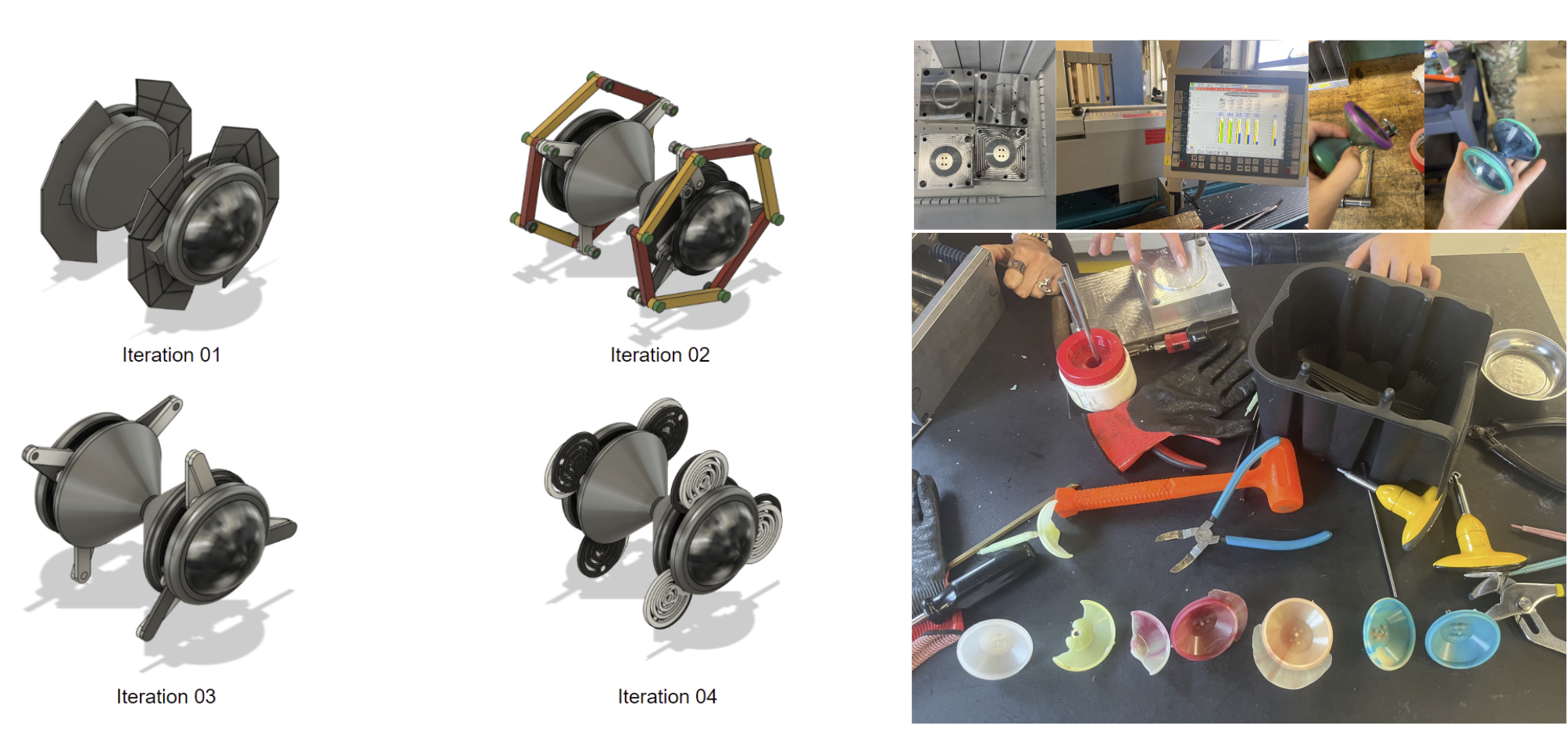
publications
Paper Title Number 1
Published in Journal 1, 2009
This paper is about the number 1. The number 2 is left for future work.
Recommended citation: Your Name, You. (2009). "Paper Title Number 1." Journal 1. 1(1).
Download Paper | Download Slides | Download Bibtex
Paper Title Number 2
Published in Journal 1, 2010
This paper is about the number 2. The number 3 is left for future work.
Recommended citation: Your Name, You. (2010). "Paper Title Number 2." Journal 1. 1(2).
Download Paper | Download Slides
Paper Title Number 3
Published in Journal 1, 2015
This paper is about the number 3. The number 4 is left for future work.
Recommended citation: Your Name, You. (2015). "Paper Title Number 3." Journal 1. 1(3).
Download Paper | Download Slides
Paper Title Number 4
Published in GitHub Journal of Bugs, 2024
This paper is about fixing template issue #693.
Recommended citation: Your Name, You. (2024). "Paper Title Number 3." GitHub Journal of Bugs. 1(3).
Download Paper
Paper Title Number 5, with math \(E=mc^2\)
Published in GitHub Journal of Bugs, 2024
This paper is about a famous math equation, \(E=mc^2\)
Recommended citation: Your Name, You. (2024). "Paper Title Number 3." GitHub Journal of Bugs. 1(3).
Download Paper
talks
Talk 1 on Relevant Topic in Your Field
Published:
This is a description of your talk, which is a markdown file that can be all markdown-ified like any other post. Yay markdown!
Conference Proceeding talk 3 on Relevant Topic in Your Field
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
teaching
Teaching experience 1
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Teaching experience 2
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.